Preliminary Research and Documentation
Modules
The complete project comprises of the following modules:
- Real time object tracking System
- Wrist tag
- Unmanned underwater vehicle (UUV)
Real time Object Tracking System
The real time object tracking system is designed to identify, tag and monitor people. High resolution cameras, installed at strategic points like beaches, buoys and seapods continuously scan people and tag them. A unique ID is generated for each person near the water surface or in the water. This is stored in a database. Technologies like TensorFlow or YOLO (You Only Look Once) use AI algorithms to calculate the height of a person when he or she in on the beach or on the seapod.
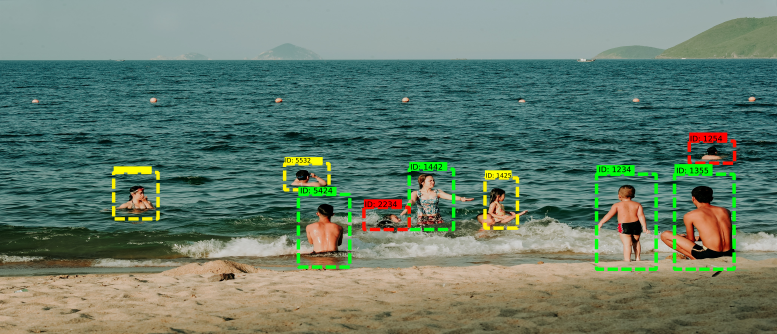
Figure 1 - Sample image to illustrate real time object tracking and tagging on a beach using AI.
When this person enters into the water, the AI module monitors the person position, section of body that is in water. Depending on the section of body that is above water, the algorithm tags them with a safety indicator.
For example, the following indicators are displayed on the console:
- GREEN - Person is on sand, or a hard surface, is stationary or moving
- GREEN - More than 50% of the body is visible, and is stationary
- GREEN - More than 50% of the body is visible and is moving
- YELLOW - Between 10% and 40% of the body is visible and stationary
- YELLOW - Between 10% and 4% of the body is visible and stationary
- RED - Less than 10% of the person is not visible for more than 30 seconds.
Each of these sample indicators will change in real time depending on the swimmer's images that are visible to the high resolution cameras. A log is written to the system and the database is constantly updated.
If a swimmer does not surface for more than 30 seconds, the software sends a signal and deploys the the unmanned underwater vehicle (rescue bot). Alternatively, if the monitoring lifeguard sees a red indicator on a particular person, he or she can manually deploy the UUV for rescue.
Wrist Tag
A GPS or RFID wrist tag is to be worn by swimmers when going into water. The GPS or RFID unit gives the exact position of the person wearing it. The wrist tag also monitors the pulse or heartbeat of the swimmer and relays the same to the console. If there is an irregularity in the pulse, and the person is in water, the person is tagged as YELLOW or RED in the software console.

Figure 2 - A sample RFID/GPS wrist tag that has a distress button to raise alerts.
The wrist tag also has a push button that can raise an alarm. When the software or the wrist tag alerts are received, an unmanned underwater vehicle is deployed to that position for rescue.
Unmanned Underwater Vehicle (Rescue Bot)
An unmanned underwater vehicle is used for rescuing drowning victims. Based on data received from the software console, or if triggered manually by a lifeguard, the UUV sets course to the exact position of the victim based on GPS co-ordinates.

Figure 3 - Illustration of a sample unmanned underwater vehicle with easy grip handles.
The UUV (rescue bot) has easy grip handles for drowning victims to grab, and secure themselves. The vehicle is fitted with search lights and cameras, so that the rescue can be monitored from the console.
Alternately, a lifeguard can disable the automatic mode (UUV-mode) and remotely operate (ROV-mode) the rescue bot.
Note: Detailed specifications and information about the unmanned underwater vehicle is available here.
Licensing
This project is being developed as an open-source project with the following licensing:
- Software: GPL-3.0 - https://www.gnu.org/licenses/gpl-3.0.en.html
- Hardware, Design & other Intellectual Property: CC-BY-SA-4.0 - https://creativecommons.org/licenses/by-sa/4.0/