Preliminary Research and Documentation


Figure 1 - Underwater portion of the SWATH chassis design.
Requirements
Ballast Tanks
The chassis is designed to hold 2 sets of ballast tanks, one set at the front of each hull and one set at the back of each hull. These ballast tanks are connected to 2 water pumps that can fill or empty the ballasts when needed. The ballast tanks must be full at all times to keep the SWATH stable.

Figure 2 - Ballast tanks and hull.
Foam Liner Compartment
The foam liner compartment is a layer of foam under the belly of the SWATH concept car. The foam liner compartment ensures that the SWATH does not sink even if it is filled with water.
Rudders and Tail
Rudders are small boat-shaped rudders that can turn clockwise and counter clockwise.
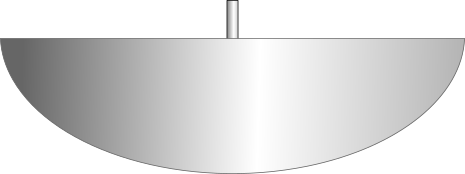
Figure 3 - Side view of a rudder
![]()
Figure 4- Top view of a rudder
Placing Rudders and Tail
A set of 4 rudders are placed at the front of each hull. A pair of tails are placed at the rear of each hull.

Figure 5 - Bottom view of the hull with rudders and tail

Figure 6 - Side view of a hull with rudders
Each rudder has a connector rod that is placed perpendicularly to the central axis of the rudder. The connector rod is then connected to a control rod that connects all the rudders together.

Figure 7 - Top view of the connector and control rods

Figure 7 - Side view of the connector and control rods

Figure 8 - Front view of the rudder, connector and control rods
Tail
The tail is a boat shaped structure that is placed at the rear of the hull away from the ballast tank. The tail is fixed and cannot turn. It keeps the craft stable and easy to maneuver.
Rudder Movement
Each rudder is fixed to the base of the hull and can turn clockwise and counter clockwise. This turning action is controlled by the control rod. The control rod can move forward and backwards, there by turning the angle of the rudders. Control rods from each hull are controlled by the central steering system.
If the control rod moves forward, the rudders turn counter clockwise.

Figure 9 - Counter clockwise movement of the rudders.
When the control rod moves backwards, the rudders turn clockwise.

Figure 10 - Clockwise movement of the rudders.
Thruster Panel
A thruster panel is designed to hold 4 rim-driven thrusters. Each thruster is controlled independently from the navigation console. It is placed between the 2 hulls and housed in the chassis. The depth of the thruster panel can be adjusted from the navigation console.

Figure 11 - Thruster panel
Helm (Steering Control) System
The steering control system consists of a steering wheel that centrally connects to a propeller shaft. The propeller shaft connects to the axle shaft.

Figure 12 - Complete movement and operational control system.
Turning the steering wheel clockwise or counter clockwise turns the direction of the rudders.

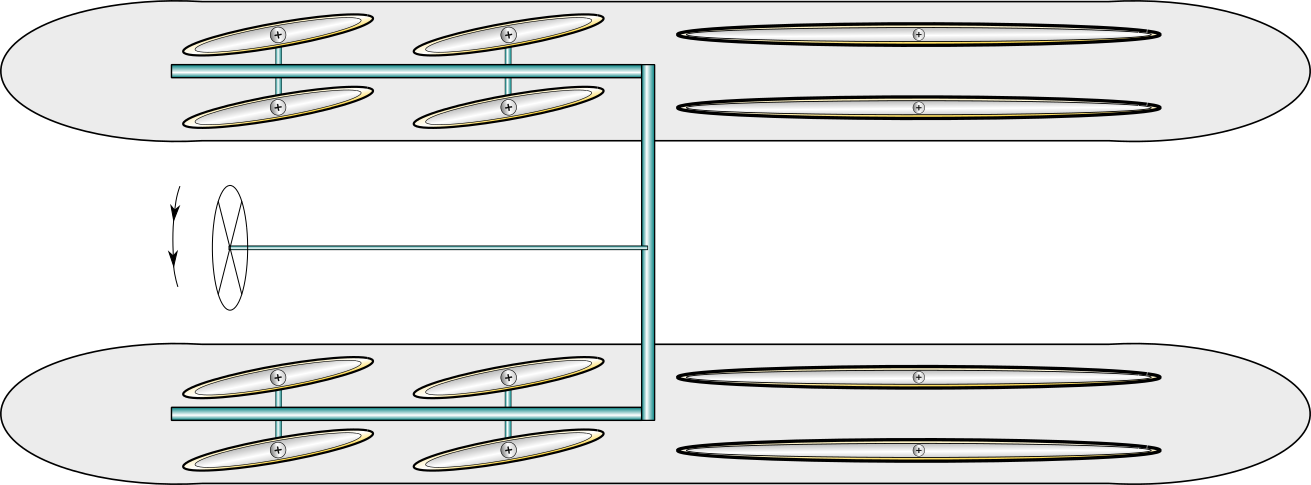
Figure 13 - Clockwise and counter clockwise movement of the steering wheel.
The movement of the rudder is controlled by installing gear wheels on the propeller and axle shafts.
Additional Components
The following are additional components that need to be installed:
- Movement sensor (9 axis accelerometer)
- Water level sensor in buoyancy tanks
- Water level sensor of the vessel relative to the ocean
- Water/air temperature sensor - Optional
- Additional sensors - Optional
- The vessel should be able to connect via API to the Ocean Builders web server when in range of the internet (specific APIs to be determined later) - BONUS
Licensing
This project is being developed as an open-source project with the following licensing:
- Software: GPL-3.0 - https://www.gnu.org/licenses/gpl-3.0.en.html
- Hardware, Design & other Intellectual Property: CC-BY-SA-4.0 - https://creativecommons.org/licenses/by-sa/4.0/