Preliminary Research and Documentation
Modules Requirements
TheTrim completeor projectBallast comprises of the following modules:Tanks
Real time Object Tracking System
A real time object tracking system is designed to identify, tag and monitor people and objects and store their image information in a database. Software applications can process this data and create workflows that help in securing seapods, and tracking boats, yachts and even.
Boat Identification
High resolution cameras, installed at strategic points like beaches, buoys and seapods continuously scan and monitor the water surface for ships, boats and yachts. Underwater cameras are installed on buoys, seapod bases, or mounted on rocks to monitor underwater activity. Data and images from both sources are collated and a unique ID is generated for each boat that passes by these strategic locations. The unique ID along with the image code is stored in a database. Technologies like TensorFlow or YOLO (You Only Look Once) use AI and ML to analyze the ship and a log is created every time the ship or boat passes by.Steering
Optionally,Buoyancy a unique display code, QR code or AR code is generated and assigned for each boat by legal authorities. These are displayed on the ship and can be scanned and identified by cameras and software from far away.Tanks
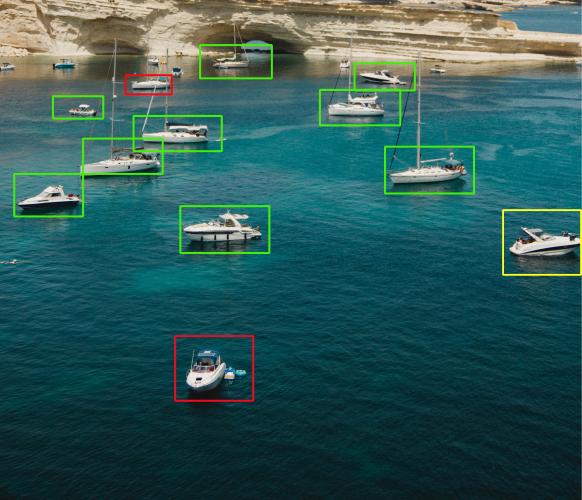
FigureRudder 1 - Sample image to illustrate real time object tracking and tagging boats using AI.
When an unidentified boat approaches a sea pod, the software triggers an alarm and notifies the residents, security personnel and legal authorities.Control
Intruder
- Control
identificationbetween one to four thrusters (electric motor-driven propellers or RIM drive motors) of up to 2 kilowatts per thruster. - Each thruster should be able to be controlled in forward and
theftreversepreventionmovement. - Precise control of between one and five control surfaces like rudders and fins using marine grade stepper motors so we have directional control and they could potentially be used for stabilizing movement when stationary in the water.
- A fuel level indicator for gas or diesel.
- A battery charge level indicator.
- Control four trim tanks: We will have multiple trim tanks which can be filled or emptied with water with pumps. Two tanks will be at the front (one on the left and one on the right hull). Two tanks will be at the back (one on the left and one on the right hul). These tanks do not need to fill or empty water too fast as the trim will not need to be changed often or rapidly on each trip. They will help keep the vessel level when weight is moved around on the passenger platform. We will need pumps to move the water or air from tank to tank.
- Control four buoyancy tanks: We will have up to four buoyancy control tanks which will add/remove water/air as needed from the tanks to adjust the height of the
followingvesselmodules:depending- on
Motionwhethersensorsthe vessel is in movement or docked or in other situations that require the height to be adjusted.FacialAllrecognitionpumpssystemwill run on 12, 24, or 48VDC (TBD).AlarmMovementsystemsensor (9 axis accelerometer)- Water level sensor in buoyancy tanks
- Water level sensor of the vessel relative to the ocean
- Water/air temperature sensor - Optional
- Additional sensors - Optional
- The vessel should be able to connect via API to the Ocean Builders web server when in range of the internet (specific APIs to be determined later) - BONUS
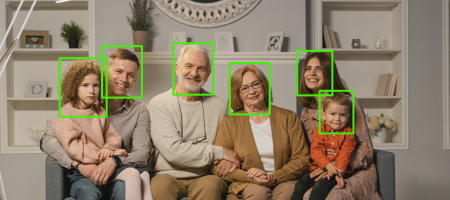
Data and images from all these sources are collated and a unique ID is generated for each person. Technologies like OpenCV, TensorFlow or YOLO (You Only Look Once) use AI and ML to identify a person a log is created every time the person passes by the camera.Motion SensorsMotion sensors or movement sensors are electronic devices that detect and measure movement. It uses ultrasonic sensor technology and emit sound waves to detect presence of objects. Motion sensors are installed in different areas of the seapod. When residents are away, these motion sensors scan the covered area for intruders. When motion is detected, the sensor triggers an alarm and sends a notification to the resident and local authorities.Facial Recognition SystemHigh resolution cameras, installed at strategic points inside and outside seapods, buoys and boats continuously scan and monitor the area for intruders. Underwater cameras are installed on buoys, seapod bases, or mounted on rocks to monitor intruders trying to gain underwater access to seapods.Intruder identification software allows owners and residents to enter images and details of family to enter names and image capture of family and friends. This data is stored in the database.
Figure 2 - Sample image to illustrate facial recognition system for family and friends using OpenCV and AI.When an intruder breaks in to the seapod, the cameras scan the intruders face and compares it against the entries in the database. If no match is found, it triggers an alarm and sends a notification to the owners, residents and local authories.
Figure 2 - Sample image to illustrate facial recognition system for intruder using OpenCV and AI.Licensing
This project is being developed as an open-source project with the following licensing:
- Software: GPL-3.0 - https://www.gnu.org/licenses/gpl-3.0.en.html
- Hardware, Design & other Intellectual Property: CC-BY-SA-4.0 - https://creativecommons.org/licenses/by-sa/4.0/
Intruder