Preliminary Research and Documentation
Design and build a AI-based aquatic drone that can be used to clean up floating trash from the surface of rivers, lakes, seas and oceans.

Requirements
First stage / Proof of Concept
TheRecord Aquacyclerfootage mustfrom containan underwater camera, ideally mounted on a buoy in a similar kind of location to where we intend to deploy the followingsmart partsbuoys. andDevelop componentsalgorithm to automatically detect moving objects of interest.
Classification
If an expert can identify in the footage some of the species that we are most likely to encounter, then this can form the training data for a machine learning-based classifier, e.g. Google DeepLab (open source).
360° Multi-Camera Setup
By using a ring of outward-looking cameras mounted around the buoy we could cover the entire azimuthal surround. This would be helpful for a number of reasons:
Body-AvoidAre-countingwater-proofthe same target as it moves in andaerodynamicoutbodyofthatframeisbydesignedtrackingtobetweencollect floating trash and store it.cameras.ArmsMonitor-allAquacyclerdirections,haseliminatingavariabilitypair of movable arm-like structures that can collect trash and lead itdue to thecrusherdirection the camera happened to be pointing.- By combining with GPS and
shredder.compass data, gain some idea of migration patterns (daily or seasonal).
Fairly wide-angle lenses would therefore be desirable to cover the entire visual surround with as few cameras as possible, although extreme fisheye lenses would introduce radial distortions that might complicate the image processing.
3D Tracking
If we double up the camera ring described above so that all directions are imaged by (at least) two cameras (e.g. eight cameras with 90° fields of view spaced at 45° intervals), then we can perform stereoscopic 3D to estimate range in an analogous fashion to human binocular depth perception. The greater the spatial separation of the cameras (i.e. the diameter of the camera ring), the more accurate this will be - what size of rig can we feasibly mount on a buoy? Range data would be essential for estimating target size (small and near versus big and distant) and speed. It could also help us to control for our detection radius changing because of variable turbidity (see below).
Choice of sensor technology
I propose to use standard visible-light cameras and natural illumination.
Pros:
- Cameras - even ones suitable for underwater use - are cheap and readily available.
Crusher/ShredderHigh-quality open-source software for image/video analysis is available (ImageJ, OpenCV, DeepLab, etc.) in a way that it would not be for more exotic sensor modalities.- Passive sensing using ambient light minimises the ecological impact on the habitat in question, compared to emitting light or sound, which could skew our results if the animals were able to perceive it in any way. (For example, imagine trying to count moths using a bright floodlight.) It also saves power, which might be important for a solar-powered autonomous buoy.
- Images / video are good for PR -
Anainbuiltpicturecrushersays a thousand words!
Cons:
- Night-time tracking is impossible. A potential solution would be to use infrared (IR) illumination and
shredderIR-sensitive cameras, as (to my knowledge) no animals can see wavelengths longer than about 800nm. Unfortunately, water transmits IR rather poorly, so the lights would need tobreakbedown large plasticbright andotherthustrash.power-hungry. Nevertheless, high-power IR LEDs might be a possibility.
Other practical concerns
Many of these will be addressed by seeing the test footage and thereby getting a feel for the nature of the problems the machine vision system has to deal with.
- Image stability. As the camera(s) are mounted on a floating buoy, presumably the image will not be steady. Depending on the severity of the movement, this could present various challenges for the algorithm.
ConveyorWaterBeltturbidity.-IfAtheconveyorwaterbeltis clear, then the limiting factor on our range will be the size of the animals. However, if the water is very murky then this could severely limit our detection radius, possibly even rendering cameras useless. Furthermore, if the turbidity of the water is variable, then this will be a major confounding factor on our measurements of animal populations at different times.- Visual clutter. What depth of water will the buoys be in? Can we assume that
carriesanytrashmovingtovisual object is an animal? If, for instance, thecrusher and shredder. Aquacycler Console- A console is needed to viewcamerainputcanandseecontrolseaweed swaying themovementcurrent,andthennavigation.this Cameraswill-greatlyMultiplecomplicateunderwaterthecameras that can take high resolution pictures and transfer them to a computer.Proximity sensor- Proximity sensor to safeguard Aquacycler from crashing into other ships or rocks.Aquacycler Software- Software to schedule trash cleaning, pickup and drop points, and quantitytask oftrashtargetcollected.detection. SolarWillpanels(optional) - Aquacycler canthere bedesigned to run on solar power, especially when far away from land.Automated Navigation- Aquacycler can be programmed to navigate to a specific locationobjects in theseasceneusingthatAIanimalsandcouldoceanbemapping.occluded by?RemoteMultipleOperationstarget-tracking.WhenI would hope to implement a system capable of tracking several targets at once, especially since social animals might be among the species detected. However, individually counting/tracking whole shoals of fish is probably notin automated navigation mode, Aquacycler can be remotely operated from a computer on land.feasible.
HowSimilar Aquacycler worksWork
WhetherThis company has developed the underwater camera used in automatedthe navigationmovie modeChasing orCoral: whenhttps://coralgardeners.org/. operatedThe remotely,technology Aquacycleris canready performto go and available off the followingshelf. actions:
The arm-like structures skim the surface of water and collect the floating debris and trash.The collected trashHere ispushed towardsaconveyorlivebelt.The conveyor belt transports the debrisfeed tothetheircrusher.HawaiiThe water drains back in to the ocean or sea.The crusher crushes the debris and the crushed debris falls into the shredder.The shredder shreds the crushed debris and stores it.
When Aquacycler returns to land, shredded debris can be removed for recycling or disposal.
location:

Figure 1 - Schematic diagram of Aquacycler
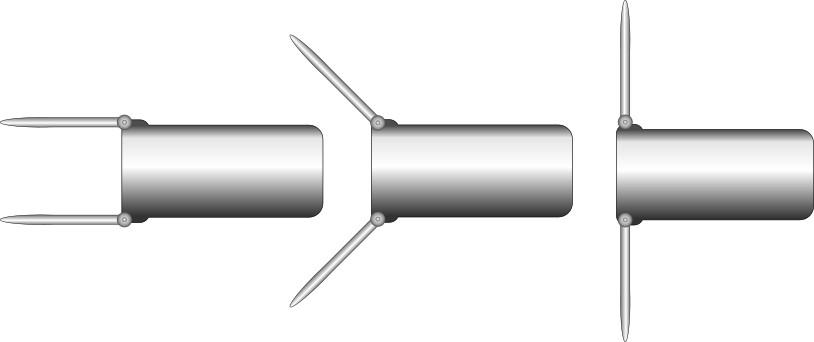
Figure 2 - Top view of Aquacycler
External Links
.
Licensing
This project is being developed as an open-source project with the following licensing:
- Software: GPL-3.0 - https://www.gnu.org/licenses/gpl-3.0.en.html
- Hardware, Design & other Intellectual Property: CC-BY-SA-4.0 - https://creativecommons.org/licenses/by-sa/4.0/