Preliminary Research and Documentation
Requirements
- Drone - A drone that can transport the camera and sensory equipment.
- Body - A shaft that is attached to the bottom of the drone. This is made of concentric and telescopic pipes.
- Cameras - Multiple underwater cameras that can take high resolution pictures and transfer them to a computer.
- Lighting system - A set of high powered lighting system to illuminate the sea bed for better picture quality.
- SONAR - An active SONAR unit to map the underwater structures and surfaces.
- Proximity sensor - Proximity sensor to safeguard the AquaScan from crashing into rocks and boulders in the water.
- Salinity sensor - Salinity sensor and circuit to measure salinity of the water.
- pH sensor - A pH sensor to measure the acidity or alkalinity of the water.
- Thermometer - A thermometer to measure the temperature of water.
- Transmitter - A transmitter that can receive signals from the sensory unit and relay the information to the software.
- Aquascan Software - Software to convert the high resolution images to accurate 3D models of the sea floor. The software must also record salinity, pH value and run real-time algorithms and produce reports on the scan.
Drone
light weight and highly efficient drone that has the following features:
| Feature | Value or description |
| Flight time |
120 minutes without payload. 90 minutes with Aquascan payload (2 kilos) |
| Range | 20 kilometers (12.5 miles) |
| Maximum forward speed | 18 meters per second |
| Operating temperature |
-5°C to 45°C |
| Gusts | Up to 55 km/hour |
| Maximum wind speed | Up to 45 km/hour |
Body
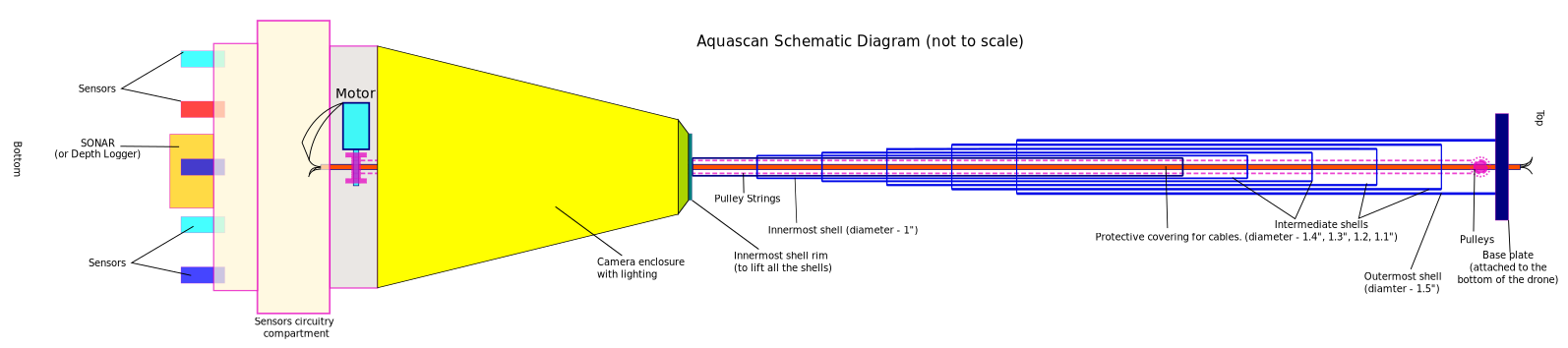
The body of Aquascan is a retractable shaft that can extend from 5 meters to 30 meters. The remote controlled shaft is attached at the bottom of the drone (see introduction pic). The body of Aquascan must be made of non-corrosive material. The shaft must be concentric telescopic pipes that can use signals from the proximity sensors and extend or retract based on the proximity of the ocean floor. The length of the shaft can also be controlled remotely by a computer.
The outer diameter of the shaft is 1.5 inches. It is made of aluminum or a plastic that can withstand water corrosion. The whole unit must be waterproof. The inner most shaft is made of plastic or polycarbonate. It must be 1 inch in diameter and hollow to allow cables and wires from the sensors unit to the transmitter on the drone.

Figure 1 - Cross section view of the retractable body
Specifications
| Length of each pipe | 5.3 meters |
| Docking length | 0.3 meters (this is the overlap each pipe is at maximum retraction length. |
 |
|
| Diameter | 1", 1,1", 1,2", 1.3", 1.4" and 1.5" |
1 bidirectional motor is installed in the sensor circuitry enclosure to control the length of the entire shaft. 4 pulleys are installed at the top of the outermost shaft. These pulleys are used to expand or retract the entire shaft. The motor is controlled remotely from a computer as well as signals from the proximity sensors at the base of Aquascan. The motor has metallic strings hooked to the inner most pipe and then to a roller mounted on the motor.
The inner most pipe in the shaft has as outward rim at the bottom edge. This allows for the innermost pipe to lift or drop the other pipes based on the depth specified from the computer and signals from the proximity sensors. The rim is also attached to the camera and lighting enclosure.
| Bottom | Top |
 |
|
Figure 2 - Illustration of AquaScan body (not to scale).
Cameras
3 high resolution cameras are placed in the camera and lighting enclosure at an angle of 120° to each other to get a complete 360° view of the ocean floor. The cables for these cameras should go through the shaft and connect to the transmitter on the drone.

Figure 3 - Camera enclosure
Top View
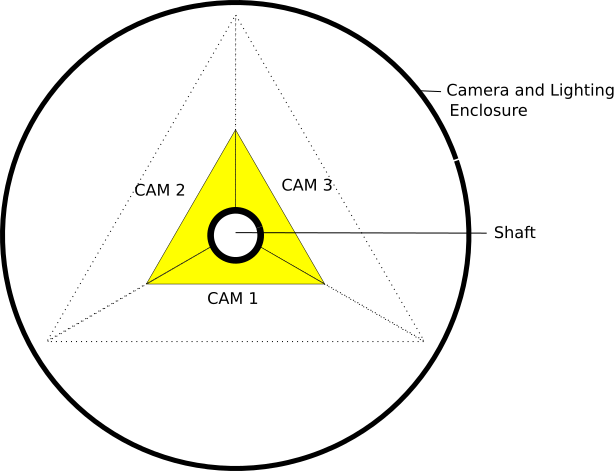
Figure 4 - Camera placement for 360° coverage.
Following are the specifications for the cameras.
| Feature | Value or description |
| Resolution (still images) | Between 17 Megapixels to 21 Megapixels |
| Image size | Between 5472 x 3648 pixels and 4736 x 3552 pixels |
| Lens size | f1.7 to f2.8 |
| Still frame rate | 11 FPS to 30 FPS |
| Coverage Angle | Viewing angle of 120° |
| Battery life | 120 minutes |
| Output formats | JPG, PNG, |
| Date and Time stamp |
The cameras must have the option to display date and time. All 3 cameras must be set to the exact date and time in the following formats: Time - HH:MM:SS Date - MM/DD/YYYY
Optional - The date and time can be set to or Coordinated Universal Time (UTC) or Greenwich Mean Time (GMT) standard time and converted to local time in the software application or vice versa. |
Lighting Unit
The lighting unit for each camera consists of 4 light rings that contain 8 bulbs each.

Figure 5 - Top view of the light ring inside the enclosure.
The light rings are fitted to the innermost shaft. 2 light rings are placed above the camera and 2 rings are placed below each camera. The inner rings are placed at 90° to the shaft. The outer strips are placed at 30° to the shaft.

Figure 6 - Side view of the lights placement in the enclosure.
Following are the specifications for the lights.
| Feature | Value or Description |
| Size | Each ring of 8 lights must not be more than 2 inches in height |
| Type | LED |
| Brightness | Between 1500 lumens and 2000 lumens |
| Lighting distance | At least 5 meters (?) underwater |
Sensors
Aquascan has enclosure that houses different sensors to get data. The following sensors are required in the sensor enclosure:
- SONAR (depth Logger)
- Proximity sensor
- Salinity sensor
- pH sensor
- Thermometer (temperature sensor)

Figure 7 - Bottom view of the sensory enclosure
SONAR (Depth Logger)
SONAR (Sound Navigation and Ranging) is used to explore and map the ocean floor. The SONAR unit is part of the sensor unit that holds circuitry for other sensors. Connecting cables are sent through the shaft to the base and the SONAR data (depth) is then transmitted to the console on the boat.
Proximity Sensor
A proximity sensor detects presence of other objects and/or marine creatures within a given range. A proximity sensor is installed in the sensor enclosure of Aquascan to safeguard it against crashing into coral reefs, or rocks and boulders under the surface of the water. This has a range of 30.48 centimeters (1 foot) - in all directions. Signals are transmitted through cables and wires through the shaft to the transmitter and then on to the console on the boat.
Note: One module in the software application must be developed that can analyze the proximity level of object and adjust the motor-controlled height of the shaft automatically.

Salinity Sensor
A salinity sensor measures the salinity of sea water and other solutions. The data is transmitted through cables and over the transmitter to the console on the ship. The salinity sensor must be capable of measuring the entire range of 24-52,000 ppm (parts per million) of sea water.
pH Sensor
A pH sensor measure the pH value of sea water (salinity). The data is transmitted through cables over the transmitter to the console on the ship.
Thermometer (temperature sensor)
The temperature of water changes as we go deeper into the ocean. The thermometer records water temperature at different depths. The data is transmitted through cables and over the transmitter to the console on the ship.
Note: Most pH sensors also have a module for measuring temperature of water.
Transmitter
A transmitter is installed on the drone that receives data from the following:
- High resolution pictures from the cameras
- Depth information from the SONAR/depth logger
- Ocean bed surface data from the proximity sensor
- Salinity data from the salinity sensor
- pH values from the pH sensor
- Temperature
The transmitter transmits this data to the console on the ship for analysis and storage. This data is then parsed and information is uploaded to the Aquascan software application.
Aquascan software application
The Aquascan software application receives all this data and creates a 3D model of the ocean floor and stores it on a centralized server that can be accessed by boats and ships to get the latest information about the surface of the ocean floor. It can also be used to find and identify marine colonies, coral reefs and caves and abysses that are not detectable by ships' SONAR.