Preliminary Research and Documentation
The following research and documentation is meant to get this project started. Please consider this a work in progress. Significant work is needed to move this project forward.
Components
The following components are required to build Manta.
- Hexacopter drone - A drone to transport payload.
- Container clasps - To
- Drone Pickup/landing platform - A platform that is installed on SeaPods. These platforms are for picking up and dropping off items.
- Storage container clasps - A set of 4 clasps that are placed perpendicular to each other.
- Storage container - A storage area to store items. A water-proof storage chamber that holds a payload of up to 20 kilograms.
- Cameras - Cameras that can take high resolution pictures.
- Lighting system - A high powered lighting system.
- Software application - Software to schedule the pickup and drop points, schedules and payloads.
Hexacopter Drone
A hexacopter drone that can transport payloads of up to 20 kilograms.
Drone Pickup/Landing Platform
A retractable landing platform is installed in each SeaPod. This serves as a pickup/drop point for the drone to deliver or collect payloads from the SeaPod.
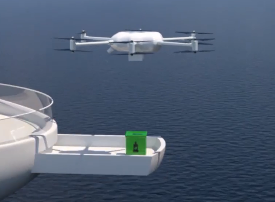
Figure 1 - Illustration of a retractable pickup/landing platform.
Optional: The platform also has a unique code (April tag) printed on it to help the drone identify the precise delivery spot. This code is unique to each SeaPod. Use Python and OpenCV with April tag to identify the precise SeaPod for pickup or delivery of packages.
Storage Container Clasps
A set of 4 container clasps are installed at the base of the drone. These are mechanical clasps to grip the container, hold the container during the flight and release the container after the drone has landed. The clasps are automatically programmed in the software application to release the container on landing and grasp the container after a user command is received.
Storage Container
The storage container is used to store items that are meant for pick up delivery. The container is water proof and can automatically picked up or dislodged by the drone.
Cameras
Hi resolution cameras are placed around the body the drone.
| Feature | Value or description |
| Resolution (still images) | Between 17 Megapixels to 21 Megapixels |
| Image size | Between 5472 x 3648 pixels and 4736 x 3552 pixels |
| Lens size | f1.7 to f2.8 |
| Still frame rate | 11 FPS to 30 FPS |
| Coverage Angle | Viewing angle of 120° |
| Battery life | 120 minutes |
| Output formats | JPG, PNG, |
| Date and Time stamp |
The cameras must have the option to display date and time. All 3 cameras must be set to the exact date and time in the following formats: Time - HH:MM:SS Date - MM/DD/YYYY
Optional - The date and time can be set to or Coordinated Universal Time (UTC) or Greenwich Mean Time (GMT) standard time and converted to local time in the software application or vice versa. |
Lights
A set of high powered lighting system to illuminate the sea for better visibility and picture quality. The recommended specifications for the lights are:
| Feature | Value or Description |
| Size | Each ring of 8 lights must not be more than 2 inches in height |
| Type | LED |
| Brightness | Between 1500 lumens and 2000 lumens |
| Lighting distance | At least 5 meters (?) underwater |
software application
- User sign up and authentication module
- Role-based access control
- Integration with drone GPS to specify pickup and drop points.
- Weight calculation based on inventory
- Billing module
- Inventory module (similar to a shopping cart application)
- Scheduling and delivery module
- Special delivery or emergency requests module
Licensing
This project is being developed as an open-source project with the following licensing:
- Software: GPL-3.0 - https://www.gnu.org/licenses/gpl-3.0.en.html
- Hardware, Design & other Intellectual Property: CC-BY-SA-4.0 - https://creativecommons.org/licenses/by-sa/4.0/